
In the field of industrial automation, a common misconception persists that the robot arm itself is the primary driver of productivity. While the articulated manipulator provides the necessary range of motion and precision, it remains a generic tool without a specific purpose. The true transformation of a robotic arm into a functional worker happens at the wrist. This interface is where End-of-Arm Tooling (EOAT) is integrated, serving as the bridge between digital commands and physical execution.
For production managers and engineers, understanding EOAT is essential for maximizing the return on investment in collaborative robots, or cobots. If the robot is the arm, the EOAT is the hand or the specialized instrument. It is the component that actually touches the product, applies the force, or gathers the data. Consequently, the mechanical and electronic characteristics of these tools define the limits of what an automated system can achieve.
The Shift from Manipulation to Process Execution
A robotic manipulator is designed to move through space with a high degree of repeatability. However, moving a point in space is rarely the end goal of a production line. The objective is usually a process: picking a delicate component, applying a bead of adhesive, or sanding a surface to a specific finish. These tasks require specific physical interactions that a bare robot cannot perform.
The selection of EOAT determines the cobot’s functional identity. A single robot model can serve as a palletizer in the morning and a quality control inspector in the afternoon, provided the tooling is swapped. This modularity is a cornerstone of flexible manufacturing, allowing small and medium-sized enterprises to adapt to shifting market demands without investing in entirely new robotic platforms for every new contract.
Primary Categories of End-of-Arm Tooling
Modern tooling generally falls into three broad functional categories, each catering to different operational requirements.
Gripping Systems
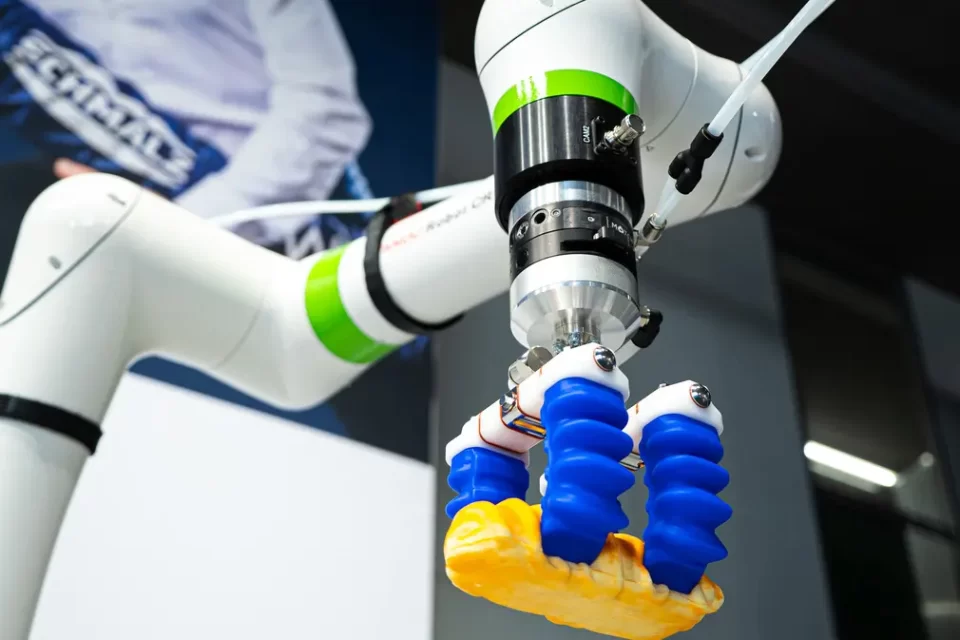
Grippers are the most common form of EOAT. They range from simple two-finger pneumatic clamps to sophisticated electric vacuum systems and adhesive grippers. In collaborative environments, electric grippers are increasingly favored because they allow for precise control over grip force and finger positioning. This precision is vital when handling fragile items or parts with varying dimensions.
Process-Specific Tools
These tools go beyond simple movement. This category includes welding torches, screwdriving units, sanding heads, and dispensing nozzles. When a cobot is equipped with a process tool, the integration complexity shifts from path planning to process control. The tool must communicate with the robot controller to ensure that parameters like spindle speed or flow rate are synchronized with the arm’s movement speed.
Sensing and Vision Tools
Sometimes the “tool” is a collection of sensors. Force-torque sensors, for instance, allow a cobot to “feel” resistance. This feedback is crucial for tasks like assembly, where a part must be seated with a specific amount of pressure. Similarly, integrated vision systems allow the robot to identify and locate parts in unstructured environments, eliminating the need for expensive and rigid fixturing.
Strategic Integration and Technical Constraints
Selecting the right tool involves a rigorous analysis of the system’s physical limits. Every robot has a rated payload, which represents the maximum weight it can carry at its wrist while maintaining specified performance levels. It is a frequent mistake to overlook the fact that the weight of the EOAT subtracts from the robot’s available payload. If a cobot has a 10kg capacity and the gripper weighs 4kg, the actual part capacity is reduced to 6kg.
Beyond weight, the center of gravity and the moment of inertia play critical roles. A long, heavy tool extends the lever arm, increasing the torque on the robot’s joints. This can lead to vibration, reduced path accuracy, or premature wear on the motors. Engineers must balance the desire for a multi-functional, heavy-duty tool with the need for high-speed dynamics and system longevity. To view more about how these variables interact, one must look at the specific compatibility charts provided by tooling manufacturers, which often detail how different mass distributions affect the robot’s acceleration limits.
Safety in Collaborative Environments
Collaborative robotics is defined by the ability of humans and machines to share a workspace. While the robot arm itself often features power and force-limiting sensors, the EOAT must also adhere to safety standards. A safe robot arm becomes a hazard if it is equipped with a sharp, unguarded tool or a gripper that could trap an operator’s fingers.
Designing for safety requires a holistic view of the application. This includes selecting tools with rounded edges, covering pinch points, and ensuring that the tool will not drop a part in the event of a sudden power loss. In contact-intensive processes like grinding or polishing, additional protective measures or speed limitations are often necessary to ensure that any accidental contact remains within the thresholds defined by ISO/TS 15066.
Impact on Process Stability and Adaptability
The repeatability of a robotic system is only as good as its end effector. If a gripper has even a small amount of mechanical play, or if a vacuum cup loses suction intermittently, the entire process becomes unstable. High-quality EOAT provides the consistency needed for “lights-out” manufacturing or high-precision assembly.
Furthermore, the software integration of EOAT has become a major differentiator. In the past, integrating a complex tool required deep knowledge of PLC programming or proprietary robot languages. Today, many collaborative tools offer “plug-and-produce” functionality. They come with pre-built software interfaces that reside directly on the robot’s teach pendant. This accessibility allows technicians to set up new tasks in minutes rather than days, which is vital for facilities lacking a large team of dedicated automation engineers.
Redefining Productivity through Tooling
The transition toward more agile production environments has placed EOAT at the center of the automation strategy. It is no longer an afterthought or a secondary component; it is the primary interface through which value is added to the product. By focusing on the capabilities of the tool, companies can unlock higher levels of precision and versatility from their existing robotic assets.
As sensors become more sensitive and actuators more compact, the line between the robot and the tool continues to blur. Future developments in soft robotics and AI-driven tactile feedback will likely further expand the range of tasks cobots can perform. For now, the successful deployment of a collaborative system remains a matter of matching the right mechanical interface to the specific requirements of the production floor, ensuring that the technology serves the process rather than the other way around.